Marine research in the Kolumbo region near Santorini is notoriously difficult due to the complexity of its hydrothermal field. However, a new research program is focusing on developing intelligent autonomous vehicles capable of operating in such challenging environments for extended periods with minimal human intervention.
The “MERLIN” project aims to change the landscape of marine exploration and conservation. Officially launched in November 2024 and coordinated by the University of Birmingham, MERLIN is a bold four-year research and innovation initiative involving 18 partners from across Europe. It is fully funded by the European Union through the Horizon Europe program, with a total budget of €8 million.
The technologies being developed under the program are expected to have applications beyond scientific research, including infrastructure inspection, environmental monitoring, and supporting sustainable practices in the maritime industry.
At the heart of the program is the development of technologies enabling autonomous marine vehicles to operate independently for long durations, collecting vital marine data and performing complex tasks in varied conditions.
According to Professor Mallorquin Papailias of the University of Birmingham’s School of Metallurgy and Materials, who coordinates the MERLIN project, autonomous marine robotic systems will play a crucial role in enhancing our understanding of marine ecosystems. “These technologies are not just research tools—they are fundamental to protecting marine habitats and advancing the sustainability of the Blue Economy,” he stated to the Athens News Agency.

Commercially available Autonomous Underwater Vehicles (AUVs) and Remotely Operated Vehicles (ROVs) typically require costly, crewed support vessels. Their ability to retrieve objects with robotic arms heavily depends on the operator’s skill. The physical challenges and high costs associated with deep-sea research missions and offshore infrastructure inspections make such operations highly complex, risky, and expensive—only a few organizations worldwide can reliably carry them out.
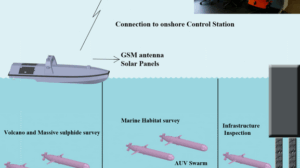
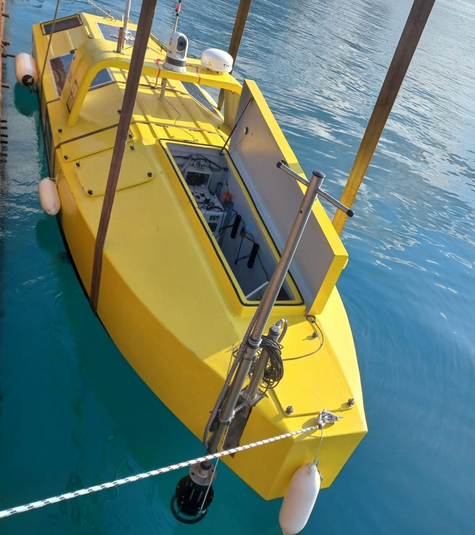
MERLIN proposes an innovative methodology combining the use of intelligent autonomous AUVs deployed and recovered by an Uncrewed Surface Vessel (USV). These will perform seabed mapping, habitat monitoring, infrastructure inspection, and sample collection. The robotic vehicles will feature enhanced sampling capabilities, allowing them to handle various underwater and surface objects. Modular sensor payloads will be tailored for specific mission tasks, and AI tools will boost autonomous navigation to adapt to changing conditions. A Mission Remote Control Center (MRCC) will enable human supervisors to interact with and send commands to the USV and AUVs via wireless or satellite communication. Underwater commands to AUVs will be transmitted using an acoustic modem on the USV.
Professor Papailias explains that autonomous systems technology has evolved significantly in the last decade. However, commercially available (non-military) systems are typically limited in range or rely on remote control or pre-programmed missions with minimal adaptability.
“With the earlier ENDURUNS project and now its successor MERLIN, we’re developing new surface robotic systems that can deploy underwater vehicles directly to mission zones and provide them with underwater positioning data, eliminating the need to surface,” he emphasized.
These vehicles offer numerous advantages. “Besides being electrically powered, they combine hydrogen fuel cells with hydrogen storage to recharge lithium batteries and are equipped with solar panels for the surface vehicle. In MERLIN, we’re enhancing AI capabilities so the vehicles can make real-time decisions to optimize their missions based on selected parameters. They’ll also be equipped with robotic arms for sampling or inspecting coastal infrastructure. Their autonomy significantly reduces mission deployment costs and enables continuous monitoring of areas of interest,” he added.
Field trials in Barcelona, Santorini, and Lithuania
The pioneering vehicles developed in MERLIN will undergo real-world testing in three missions, each with unique challenges.
The first mission will be conducted at the OBSEA marine observatory off the coast of Barcelona, offering controlled open-sea conditions to test monitoring systems and vehicle sensors.
Next will be the particularly demanding mission at the underwater Kolumbo volcano crater northeast of Santorini. Led by the Hellenic Centre for Marine Research (HCMR) with Dr. Paraskevi Polymenakou and Professor Evi Nomikou of the National and Kapodistrian University of Athens—head of the “SANTORY” underwater observatory—this mission will test the vehicles’ ability to operate in extreme conditions and collect data from a unique underwater volcanic ecosystem.
As Professor Nomikou told the Athens News Agency: “In Kolumbo’s crater, near the active hydrothermal field, we face extreme environmental conditions—low pH, high temperatures, and intense CO₂ emissions. Using an autonomous underwater vehicle pre-programmed with AI before diving into the crater allows us to collect samples in the future without costly oceanographic ships, thus reducing research costs. This will be the first time a fully autonomous vehicle collects a sample at Kolumbo, after simulating the hydrothermal field using data from SANTORY. During seismic crises, like in February 2025, such vehicles are essential for rapidly gathering oceanographic data.”
The third mission will focus on inspecting port infrastructure at the port of Klaipeda in Lithuania, in the Baltic Sea. Here, the autonomous vehicles will be tested in a practical commercial environment, showcasing their potential for industrial applications.
Ask me anything
Explore related questions




